- Arduino UNO is the most prolific version of Arduino board, and runs at 5v DC. It's I2C interface (Analog pins A4 and A5) will drive to 5v.
- Raspberry Pi runs at 3.3v. Both of it's I2C interfaces run at 3.3v.
- I2C devices purchased through Sparkfun, Adafruit, SeeedStudio, Parallax, Pololu, can be any combination of 3.3v or 5v
Running a 3.3v I2C device on a 5v I2C bus
will either destroy the device immediately...
or more likely...
significantly reduce it's lifespan.
So, how do we safely run 3.3v devices alongside 5v devices on the same bus?
With a Bi-directional Logic Level Converter
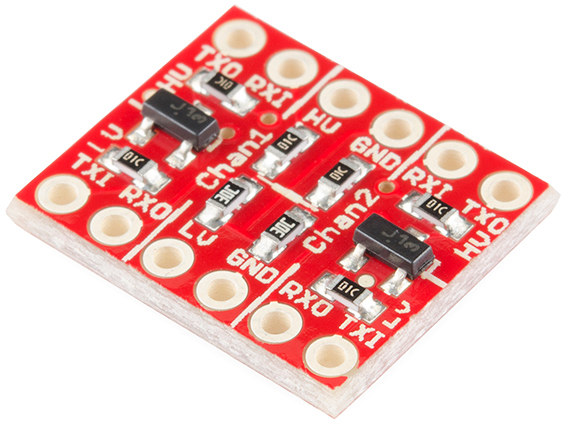 |
| Logic Level Converter: https://www.sparkfun.com/products/11978 |
From Sparkfun's Tutorial:
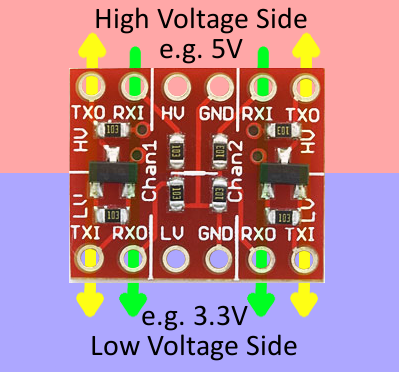
The LLC is designed to be very easy to use. Silkscreen indicators help identify which pins do what. There are twelve pins total – six on each side. We can divide them into groups of three to more clearly define how they relate:
The middle section of the board is where the reference supply for your high and low voltages should go. Supplying voltage to all four of these pins is required. If you’re converting 3.3V to 5V (and vice-versa), for example, you’d run 5V into the “HV” side, and 3.3V into the “LV” input. Make sure each is grounded too!
The outer pins correspond to inputs and outputs for channels 1 and 2. Each channel has one voltage divider and one MOSFET shifter.
The labels on these pins – “RXI”, “RXO”, “TXI”, and “TXO” – help describe what each pins does:
- RXI – High voltage input to voltage divider from high-voltage device. Signal will be shifted down and sent to low-voltage device on “RXO” pin.
- RXO – Low voltage output from voltage divider to low-voltage device. Signal is shifted down from “RXI” input.
- TXI – Low voltage input/output of MOSFET circuit. This pin interacts with “TXO” on the high side. Bi-directional, but this is the only shifter that will shift from low to high.
To send a signal from the low-voltage side to the high-voltage side (e.g. from 3.3V to 5V), the signal must be input at “TXI”. It’ll pass through the converter and come out as a higher voltage on the “TXO” (transmit output) pin.
- TXO – High voltage input/output of MOSFET circuit. This pin interacts with “TXI” on the low side. Bi-directional, but this is the only shifter that will shift from low to high.
On the other hand, a signal that strictly travels from high to low-voltage should pass from “RXI” to “RXO”.
Sending a signal from the high side to the low side is less restricted. We can use either the bi-directional channel or the voltage divider, but we may need to leave the bi-directional channel for converting from low-to-high.
Example Wiring of 3.3v and 5v I2C devices together.
Here, we have an Arduino UNO, an Accellerometer, a Compass, a Barometric Pressure Sensor, and a Raspberry PI all on the same I2C channel. The neat thing is that with the UNO, as it has a 3.3v regulator on board, you can power both 3.3v and 5v devices.
 |
| Raspberry Pi and Arduino over I2C |
References:
Arduino Forum : I2C Bus with 3.3v and 5.0v Device
Raspberry Pi and Arduino linked via I2C
Sparkfun: Using the Logic Level Converter
https://www.sparkfun.com/products/11978
UM10204: I2C-bus specification and user manual Rev5
Sparkfun,
Adafruit,
SeeedStudio,
Parallax,
Pololu,